Mission Spotlight
Embodied Intelligence
The Quest’s research is organized around Missions, long-term collaborative projects rooted in a foundational question in intelligence. One of the earliest Missions established, the Embodied Intelligence Mission addresses how we perceive the world around us and integrate this information to plan and complete tasks — and then asks if robots can do the same. Its researchers build software tools to learn how humans and machines perceive objects in space, and then they apply that understanding to ask the robots in their labs to manipulate and balance blocks.
An interview with Nick Roy
Nick Roy is the Director of Quest Systems Engineering, a Professor in MIT’s Department of Aeronautics and Astronautics, and a principal investigator in CSAIL. His research interests in artificial intelligence, machine learning, human-computer interaction, and robotics brought him to the Quest’s Embodied Intelligence Mission, where he thinks about how machines can learn to handle the uncertainty that comes from sensing and acting in a dynamic, unstructured, and populated environment. We asked him for a quick Q&A about his work with the Embodied Intelligence Mission.
Things vs. Stuff
When we are baking cookies, we pull out lots of stuff — eggs, butter, flour — which we handle with a variety of things — mixers, spoons, baking sheets, spatulas. A team of MIT researchers have determined that different brain mechanisms are used when thinking about nonsolid items like water, grains of sand, or honey (stuff) versus items that can easily be grasped and manipulated like coffee cups, books, or clothing (things). “When you’re looking at some fluid or gooey stuff, you engage with it in a different way than you do with a rigid object. With a rigid object, you might pick it up or grasp it, whereas with fluid or gooey stuff, you probably are going to have to use a tool to deal with it,” says Nancy Kanwisher, the Walter A. Rosenblith Professor of Cognitive Neuroscience. The paper appeared in Current Biology.
Read more on MITNews.
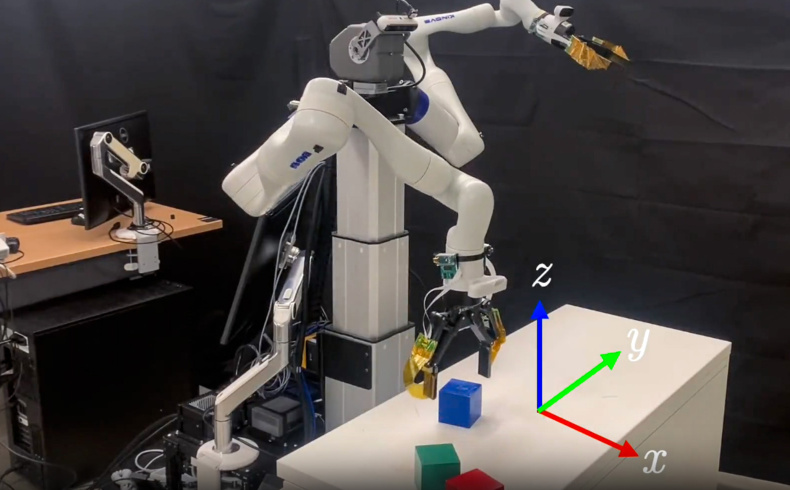
Task and Motion Planning
Loading the dishwasher is a test of spatial relations, especially when big bowls take up most of the rack. Could a task like that, which requires understanding of object size, density, and fragility be done by a robot? Recent Quest-sponsored research has studied how robot manipulation requires making decisions about which objects to interact with and how to interact with them. A robot planner must identify obstacles and move items around them, safely and securely.
Read more on MITNews.
Computational Basis of Everyday Action Planning
To explore the way humans complete simple tasks, Beckett Roberge '28 spent a UROP in the Kanwisher Lab creating a virtual reality simulation of catching a ball. He is now working with Aryan Zoroufi on tracking subjects' movements and comparing them to how different computational techniques catch the ball in the same simulation.
Latest News from the Quest
Golden Brain Award
We are thrilled to learn that Jim DiCarlo, Director of the Quest for Intelligence, has been named the 2025 winner of the Golden Brain Award. The Golden Brain Award is an international science award in the field of neuroscience, presented by the Minerva Foundation, and recognizing fundamental contributions to research in vision and the brain. “In honoring James DiCarlo, we celebrate a scientist whose work stands out as a pioneering example of interdisciplinary inquiry at the frontiers of brain science," said Vero Bellow, Executive Director, Minerva Foundation.
On-campus Events
The Quest hosts lectures, seminars, and workshops throughout the academic year. If you are interested in attending, please join our mailing list — and if you can't be there in person, recordings are available on our YouTube channel.